近日,機(jī)械工程學(xué)部青年教師李振雨博士圍繞面向復(fù)雜極端環(huán)境移動(dòng)機(jī)器人位置識(shí)別方法的研究成果發(fā)表在《IEEE Transactions on Industrial Informatics》(中科院一區(qū)Top期刊,IF: 11.7)、《IEEE Transactions on Intelligent Transportation Systems》(中科院一區(qū)Top期刊,IF: 7.9)等學(xué)術(shù)期刊。李振雨為文章的第一作者和通訊作者,上海交通大學(xué)、同濟(jì)大學(xué)和上海應(yīng)用技術(shù)大學(xué)為研究成果的合作單位。
在《IEEE Transactions on Industrial Informatics》發(fā)表的論文“Toward Robust Visual Place Recognition for Mobile Robots With an End-to-End Dark-Enhanced Net”,以低光照下環(huán)境的移動(dòng)機(jī)器人位置識(shí)別為研究對(duì)象,通過訓(xùn)練一個(gè)輕量級(jí)低光照增強(qiáng)網(wǎng)絡(luò),利用殘差連接的對(duì)抗學(xué)習(xí)模型方法有效改善圖像照度質(zhì)量。在此基礎(chǔ)上,構(gòu)建了雙級(jí)采樣的金字塔變換器,通過聚合重構(gòu)描述符提取判別特征。此外,還構(gòu)建了一種基于交叉熵?fù)p失的重排名網(wǎng)絡(luò),進(jìn)一步提升位置識(shí)別的精度。技術(shù)路線如圖1所示。
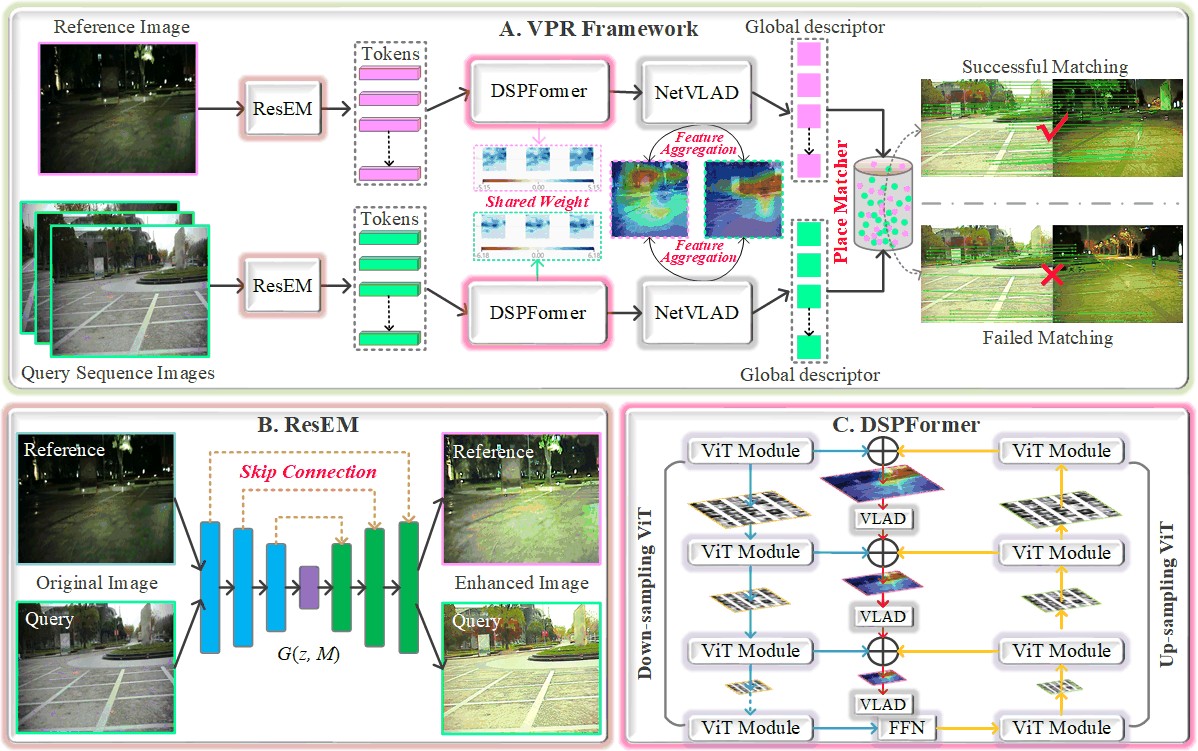
圖1 基于低光照增強(qiáng)網(wǎng)絡(luò)的移動(dòng)機(jī)器人位置識(shí)別技術(shù)路線
在《IEEE Transactions on Intelligent Transportation Systems》發(fā)表的論文“Feature-Level Knowledge Distillation for Place Recognition Based on Soft-Hard Labels Teaching Paradigm”,以全天候機(jī)器人位置識(shí)別為研究對(duì)象,通過從幾個(gè)“教師網(wǎng)絡(luò)”到孿生“學(xué)生網(wǎng)絡(luò)”的知識(shí)遷移,學(xué)習(xí)一個(gè)緊湊、快速的全天位置識(shí)別器。根據(jù)環(huán)境的復(fù)雜程度,“教師網(wǎng)絡(luò)”可以通過軟、硬標(biāo)簽兩種教學(xué)范式向兩類學(xué)生遷移知識(shí)。為了平衡計(jì)算內(nèi)存和性能,“教師網(wǎng)絡(luò)”被設(shè)計(jì)為一個(gè)兩級(jí)采樣視覺Transformer管道,而孿生“學(xué)生網(wǎng)絡(luò)”被設(shè)計(jì)為輕量級(jí)管道。技術(shù)路線如圖2所示。
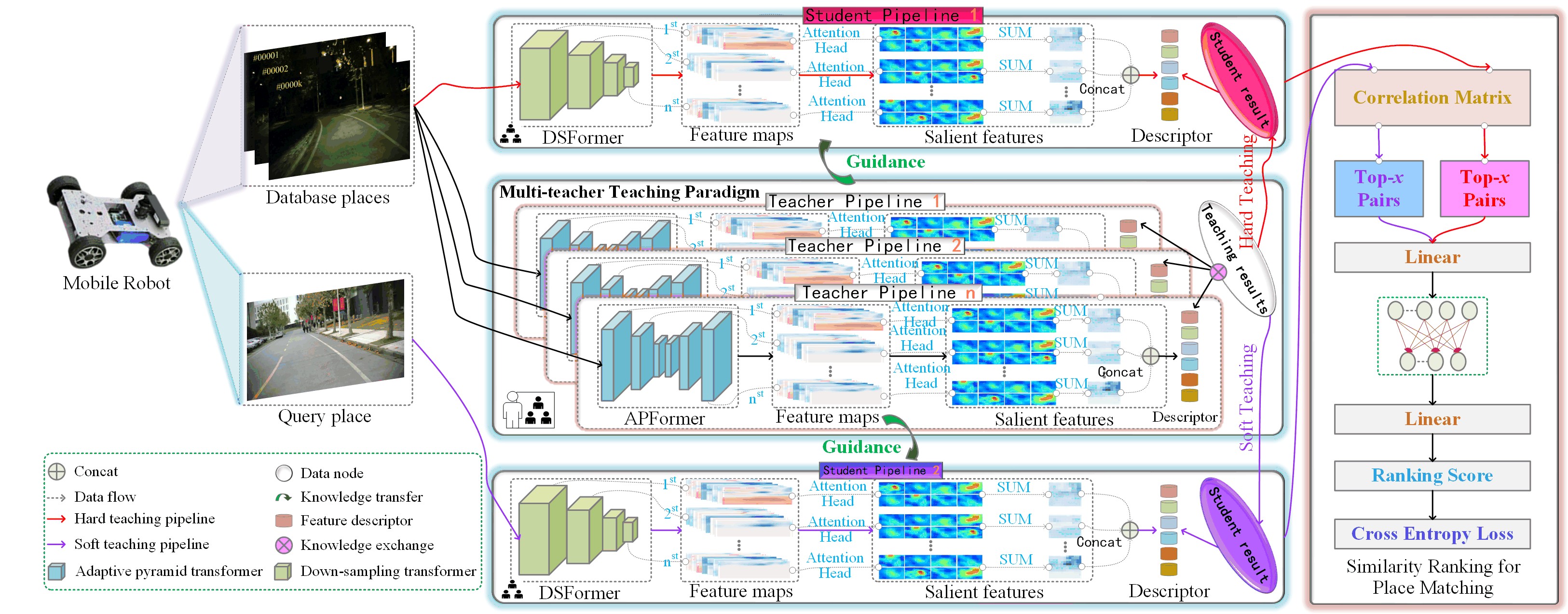
圖2 基于軟硬兼施教學(xué)范式的移動(dòng)機(jī)器人位置識(shí)別技術(shù)路線
在《Neurocomputing》發(fā)表的論文“CSPFormer: A cross-spatial pyramid transformer for visual place recognition”,構(gòu)建了一種跨空域金字塔轉(zhuǎn)換器,通過將CNN金字塔特征與Transformer多尺度特征融合加權(quán),實(shí)現(xiàn)跨空間特征表征。在此基礎(chǔ)上,構(gòu)建多重自注意層,強(qiáng)化多尺度視覺描述符的長(zhǎng)期依賴性,降低計(jì)算成本,實(shí)現(xiàn)更高效的移動(dòng)機(jī)器人視覺位置識(shí)別。技術(shù)路線如圖3所示。
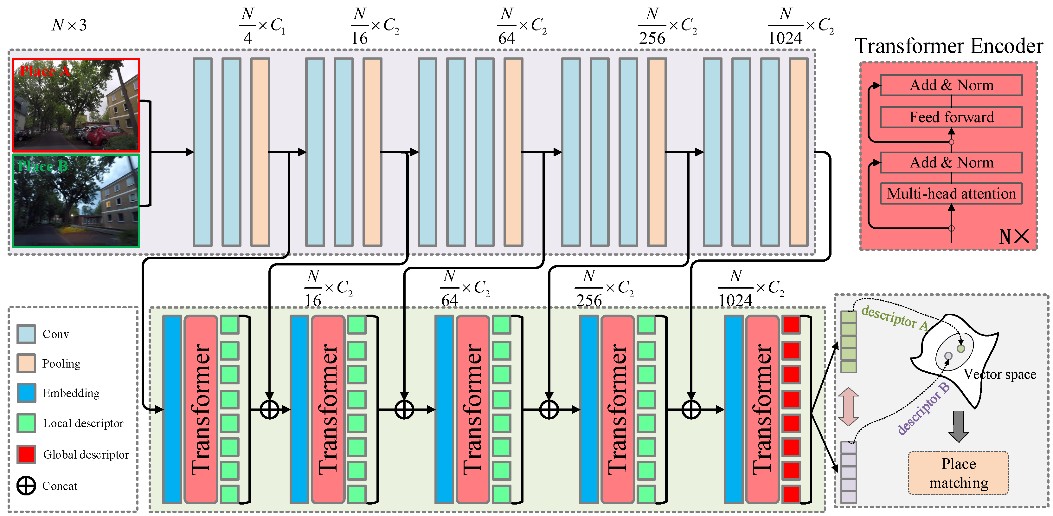
圖3 基于跨空域金字塔模型的移動(dòng)機(jī)器人位置識(shí)別技術(shù)路線
論文鏈接:1.https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10726589;
2.https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10759546;
3.https://www.sciencedirect.com/science/article/pii/S0925231224002431。

